skip to main |
skip to sidebar
This robot is very cool because it goes forward until it senses an object. It then stops, turns the front wheels one way and then the other to see which path is longer. It then chooses the longer path. I really like this robot!!!!!!Here's what the program looks like. I haven't commented the code yet. Sorry about that.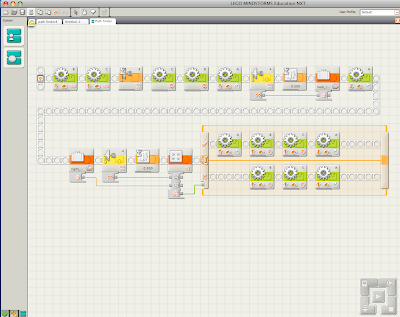

{kind=link}